Introduction
Bagua is a distributed training utility developed by AI Platform@Kuaishou Technology and DS3 Lab@ETH. Users can extend the training on a single GPU to multi-GPUs (maybe across multiple machines), with excellent speedup guarantee, by simply adding a few lines of code. Bagua also provides a flexible system abstraction that supports state-of-the-art system relaxation techniques of distributed training. Powered by the new system design, Bagua has a great ability to implement and extend various state-of-the-art distributed learning algorithms. Researchers can easily develop new distributed training algorithms based on bagua, without sacrificing system performance.
So far, Bagua has integrated primitives including
- Centralized Synchronous Communication (AllReduce)
- Decentralized Synchronous Communication
- Low Precision Communication
Its effectiveness has been validated in various scenarios and models, including VGG and ResNet on ImageNet, Bert Large, and multiple huge scale industrial applications at Kuaishou such as
- the recommendation system supporting model training with dozens of TB parameters,
- video/image understanding with >1 billion images/videos,
- ASR with TB level datasets,
- etc.
Performance
For more comprehensive and up to date results, refer to Bagua benchmark page.
Cite Bagua
@misc{gan2021bagua,
title={BAGUA: Scaling up Distributed Learning with System Relaxations},
author={Shaoduo Gan and Xiangru Lian and Rui Wang and Jianbin Chang and Chengjun Liu and Hongmei Shi and Shengzhuo Zhang and Xianghong Li and Tengxu Sun and Jiawei Jiang and Binhang Yuan and Sen Yang and Ji Liu and Ce Zhang},
year={2021},
eprint={2107.01499},
archivePrefix={arXiv},
primaryClass={cs.LG}
}
Links
Installation
Install locally
To install Bagua, besides your deep learning framework (like PyTorch), you need the following dependencies installed on your system:
- CUDA Toolkit, with CUDA version >= 10.1
- Rust Compiler
- MPI >= 3.0, for example Open MPI
- hwloc >= 2.0
- CMake >= 3.17
We provide an automatic installation script for Ubuntu. Just run the following command to install Bagua and above libraries (except for CUDA, you should always install CUDA by yourself):
curl -Ls https://raw.githubusercontent.com/BaguaSys/bagua/master/install.sh | sudo bash
If you already have dependencies installed on your system, you can install the bagua python package only:
# release version
python3 -m pip install bagua
# develop version (git master)
python3 -m pip install git+https://github.com/BaguaSys/bagua.git
Use Docker image
We provide Docker image with Bagua installed based on official PyTorch images. You can find them on DockerHub.
Getting Started
Let’s start our Bagua journey!
Migrate from your existing single GPU training code
To use Bagua, you need make the following changes on your training code:
First, import bagua:
import bagua.torch_api as bagua
Then initialize Bagua's process group:
torch.cuda.set_device(bagua.get_local_rank())
bagua.init_process_group()
Then, use torch's distributed sampler for your data loader:
train_dataset = ...
test_dataset = ...
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset,
num_replicas=bagua.get_world_size(), rank=bagua.get_rank())
train_loader = torch.utils.data.DataLoader(
train_dataset,
batch_size=batch_size,
shuffle=(train_sampler is None),
sampler=train_sampler,
)
test_loader = torch.utils.data.DataLoader(test_dataset, ...)
Finally, wrap you model and optimizer with bagua by adding one line of code to your original script:
# define your model and optimizer
model = ...
model = model.cuda()
optimizer = ...
# select your Bagua algorithm to use
from bagua.torch_api.algorithms import gradient_allreduce
# wrap your model and optimizer with Bagua
model = model.with_bagua(
[optimizer], gradient_allreduce.GradientAllReduceAlgorithm()
)
More examples can be found here.
Launch job
Bagua has a built-in tool bagua.distributed.launch to launch jobs, whose usage is similar to Pytorch torch.distributed.launch.
We introduce how to start distributed training in the following sections.
Single node multi-process training
python -m bagua.distributed.launch --nproc_per_node=8 \
your_training_script.py (--arg1 --arg2 ...)
Multi-node multi-process training (e.g. two nodes)
Node 1: (IP: 192.168.1.1, and has a free port: 1234)
python -m bagua.distributed.launch --nproc_per_node=8 --nnodes=2 --node_rank=0 --master_addr="192.168.1.1" --master_port=1234 your_training_script.py (--arg1 --arg2 ...)
Node 2:
python -m bagua.distributed.launch --nproc_per_node=8 --nnodes=2 --node_rank=1 --master_addr="192.168.1.1" --master_port=1234 your_training_script.py (--arg1 --arg2 ...)
Tips:
If you need some preprocessing work, you can include them in your bash script and launch job by adding
--no_pythonto your command.python -m bagua.distributed.launch --no_python --nproc_per_node=8 bash your_bash_script.sh
Algorithms
Bagua thrives on the diversity of distributed learning algorithms. The great flexibility of the system makes it possible to smoothly incorporate various of SOTA algorithms while providing automatic optimizations for the performance during the execution. For the end user, Bagua provides a wide range of choices of algorithms, which she can easily try out for her tasks. For the algorithm developer, Bagua is a playground where she can be just focused on the algorithm itself (e.g., the logic and control) without reinventing the wheels (e.g., communication primitives and system optimizations) across different algorithms.
In the following tutorials, we will describe several algorithms that have already been implemented within Bagua, including the main ideas of each algorithm and their usage in specific examples. Then we are going to demonstrate how to add a new algorithm into Bagua.
We welcome contributions to add more algorithms!
Gradient AllReduce
The Gradient AllReduce algorithm is a popular synchronous data-parallel distributed algorithm. It is the algorithm implemented in most existing solutions such as PyTorch DistributedDataParallel, Horovod, and TensorFlow Mirrored Strategy.
With this algorithm, each worker does the following steps in each iteration.
- Compute the gradient using a minibatch.
- Compute the mean of the gradients on all workers by using the AllReduce collective.
- Update the model with the averaged gradient.
In Bagua, this algorithm is supported via the GradientAllReduce algorithm
class. The performance of the GradientAllReduce implementation in Bagua by
default should be on par with PyTorch DDP and faster than Horovod in most cases.
Bagua supports additional optimizations such as hierarchical communication that
can be configured when instantiating the GradientAllReduce class. They can
make Bagua faster than other implementations in certain scenarios, for example
when the inter-machine network is a bottleneck.
Example usage
A complete example of running Gradient AllReduce can be found at Bagua examples
with --algorithm gradient_allreduce command line argument.
You need to initialize the Bagua algorithm with (see API documentation for what parameters you can customize):
from bagua.torch_api.algorithms import gradient_allreduce
algorithm = gradient_allreduce.GradientAllReduceAlgorithm()
Then decorate your model with:
model = model.with_bagua([optimizer], algorithm)
ByteGrad
Overview
Large scale distributed training requires significant communication cost, which is especially true for large models. For example in traditional synchronous distributed setup with AllReduce to synchronize gradients (which is the case for many libraries, such as Horovod and PyTorch DDP), in each iteration of the training process, the gradient, whose size is equal to the model size, needs to be sent and received on each worker. Such communication cost soon becomes the training bottleneck in many scenarios.
There are many existing papers about how to apply model/gradient compression to save this communication cost. Bagua provides a built-in gradient compression algorithm called ByteGrad, which compresses the gradient floats to 8bit bytes before communication. This saves 3/4 of the original cost. It implements high accuracy min-max quantization operator with optimized CUDA kernels, and hierarchical communication. This makes it much faster (about 50% faster in our benchmark) than other compression implementations in existing frameworks (such as PyTorch PowerSGD) and in the same number of epochs ByteGrad converges similar to full precision algorithms on most tasks.
For comparison with other algorithms (may or may not be compression algorithms), refer to benchmark page.
Algorithm
ByteGrad does the following steps in each iteration. Assume we have nodes and each node has GPUs.
- Calculate gradient on the -th node's -th GPU for all
- The first GPU on each node does a reduce operation to compute the average of all GPUs' gradients on the same node, defined as for the -th node
- The first GPU on -th node quantize the gradient with a quantization function : , for all . Then each node exchange the quantized version between nodes so that each node has the average of all
- The first GPU on each node broadcast the average of all s to every other GPU on the same node, and all GPUs on all workers use this quantized average to update model
The quantization function calculates the minimum value and maximum value of its input, and the split into evenly spaced 256 intervals. Then represent each element of its input by a 8bit integer representing which interval the original element is in.
Example usage
A complete example of running ByteGrad can be found at Bagua examples
with --algorithm bytegrad command line argument.
You need to initialize the Bagua algorithm with (see API documentation for what parameters you can customize):
from bagua.torch_api.algorithms import bytegrad
algorithm = bytegrad.ByteGradAlgorithm()
Then decorate your model with:
model = model.with_bagua([optimizer], algorithm)
Decentralized SGD
Overview of decentralized training
Decentralized SGD is a data-parallel distributed learning algorithm that removes the requirement of a centralized global model among all workers, which makes it quite different from Allreduce-based or Parameter Server-based algorithms regarding the communication pattern. With decentralized SGD, each worker only needs to exchange data with one or a few specific workers, instead of aggregating data globally. Therefore, decentralized communication has much fewer communication connections than Allreduce, and a more balanced communication overhead than Parameter Server. Although decentralized SGD may lead to different models on each worker, it has been proved in theory that the convergence rate of the decentralized SGD algorithm is the same as its centralized counterpart. You can find the detailed analysis about decentralized SGD in our paper.
Decentralized training algorithms
Currently, there are lots of decentralized training algorithms being proposed every now and then. These amazing works are focused on different aspects of decentralized training, like peer selection, data compression, asynchronization and so on, and provide many promising insights. So far Bagua has incorporated one basic decentralized algorithm, i.e., Decentralized SGD. With Bagua's automatic system support for decentralization, we are expecting to see increasingly more decentralized algorithms being implemented in the near future.
Decentralized SGD
Now we are going to describe the decentralized SGD algorithm implemented in Bagua. Let's assume the number of workers is , the model parameters on worker is . Each worker is able to send or receive data directly from any other workers. In each iteration , the algorithm repeats the following steps:
- Each worker calculate the local gradients of iteration : .
- Average the local model with its selected peer's model (denote as ), i.e.,
- Update the averaged model with the local gradients. .
In step 2, we adopt a strategy to select a peer for each worker in each iteration, such that all workers are properly paired and the data exchanging is efficient in the sense that each worker could exchange data with a different peer between iterations. In short, our strategy evenly split workers into two groups, and dynamically pair workers between two groups, varying from iteration to iteration.
Communication overhead
The communication overhead of decentralized SGD is highly related to the degree of network, i.e., the number of connections a worker has to other workers. Different topologies or strategies will lead to different degrees of the network. It's obvious that the Decentralized SGD algorithm we described before has a network degree of 1. Therefore, in each iteration, a worker only needs to build one connection with one worker to exchange one time of the model size. We compare the communication complexities of different communication patterns regarding the latency and bandwidth of the busiest node.
| Algorithm | Latency complexity | Bandwidth complexity |
|---|---|---|
| Allreduce (Ring) | ||
| Parameter Server | ||
| Decentralized SGD in Bagua |
Benchmark
Given the optimal communication complexity of Decentralized SGD, it can be much faster than its centralized counterparts during the training, especially when the network is slow. We provide some benchmark results here to compare the performance of Decentralized SGD of Bagua with other SOTA systems.
Example
A complete example of running Decentralized SGD can be found at Bagua examples
with --algorithm decentralized command line argument.
You need to initialize the Bagua algorithm with (see API documentation for what parameters you can customize):
from bagua.torch_api.algorithms import decentralized
algorithm = decentralized.DecentralizedAlgorithm()
Then decorate your model with:
model = model.with_bagua([optimizer], algorithm)
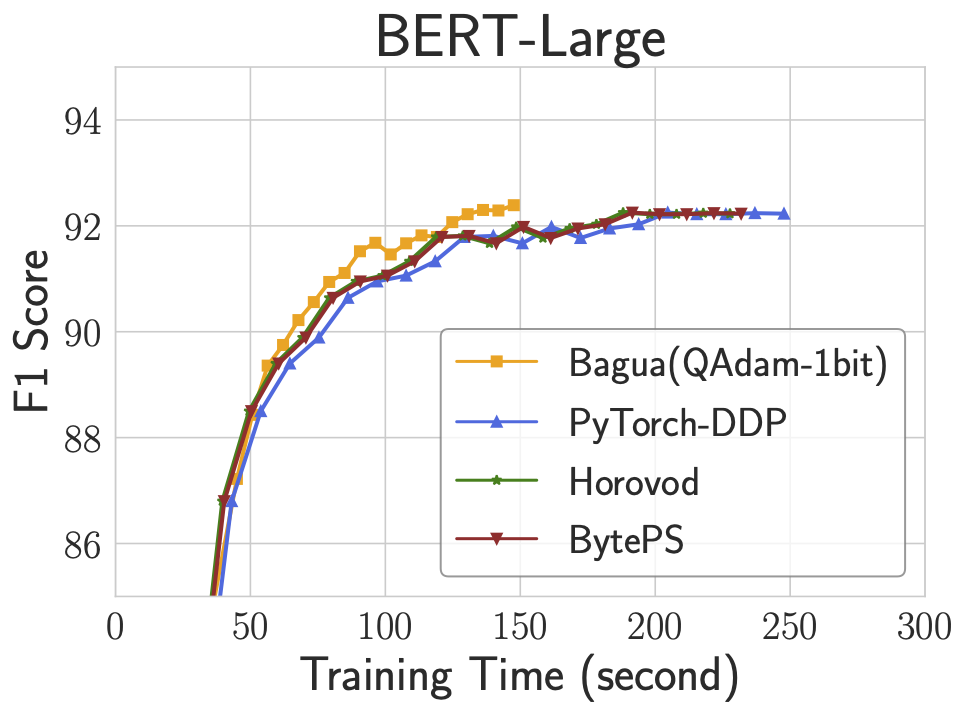
Quantized Adam (QAdam)
Overview
QAdam is a communication compression algorithm that is specifically intended for Adam optimizer. Although there are lots of SGD-based gradients compression algorithms, e.g., QSGD, 1-bit SGD and so on, none of them can be directly applied to Adam optimizer because Adam is non-linearly dependent on the gradient. Empirical study also shows that Adam with gradient compression could suffer an obvious drop in the training accuracy and cannot converge to the same level as its non-compression counterpart. Motivated by this observation, we proposed QAdam based on this paper to make it possible for Adam to benefit from communication compression.
QAdam algorithm
Let's first have a look of the updating strategy of the original Adam, which can be summaried as:
where is the index of iteration, represents model parameters, is the learning rate, is gradient at step .
As we discussed above, direct compression will lead to the diverge of training because of the non-linear component . The intuition of QAdam is that tends to be very stable after a few epochs in the beginning, so we can set as constant afterward and only update . Without the effect of , we can compress without worrying about the drop of training accuracy.
Therefore, QAdam algorithm consists of two stages: warmup stage and compression stage.
- In the warmup stage (usually takas 20% of the total iterations in the beginning), all workers communicate to average local gradients before updating and without compression.
- In the compression stage, is frozen and not updated anymore. All workers update with its local gradients and compress it into . Then will be communicated among workers.
A detailed description and analysis of the algorithm can be found in the paper.
Benchmark
We provide some benchmark results here to compare the performance of QAdam of Bagua with other SOTA systems on BERT-Large finetune task.
Limitation
As we discussed above, the QAdam is based on an assumption that the value of in Adam will quickly get stable after a few epochs of training. However, it may not work if this assumption breaks. Although we have tested the correctness of QAdam on BERT-Large, BERT-Base, ResNet50 and Deep Convolutional Generative Adversarial Networks, it is still possible that QAdam may fail on some other tasks. The condition of QAdam is still an interesting open problem.
Example
To use QAdam algorithm, you first need to initialize a QAdam optimizer, which is similar as any other optimizers in PyTorch. After the initialization of QAdamOptimizer and QAdamAlgorithm, simply putting them into the with_bagua() function of model.
from bagua.torch_api.algorithms.q_adam import QAdamAlgorithm, QAdamOptimizer
optimizer = QAdamOptimizer(model.parameters(), warmup_steps = 100)
algorithm = QAdamAlgorithm(optimizer, hierarchical_reduce=True)
Then decorate your model with:
model = model.with_bagua([optimizer], algorithm)
Benchmark
Setup
We use up to 16 servers for benchmarks, each of which is equipped with 8 NVIDIA V100 32GB GPUs interconnected by NVLink. Servers are connected by 100 Gbps TCP/IP network. We compare the performance of Bagua with Horovod, PyTorch-DDP and BytePS on various tasks, including vision task (VGG16 on ImageNet), NLP task (BERT-Large finetune on SQuAD), and speech task (Transformer on AISHELL-2).
End-to-end performance
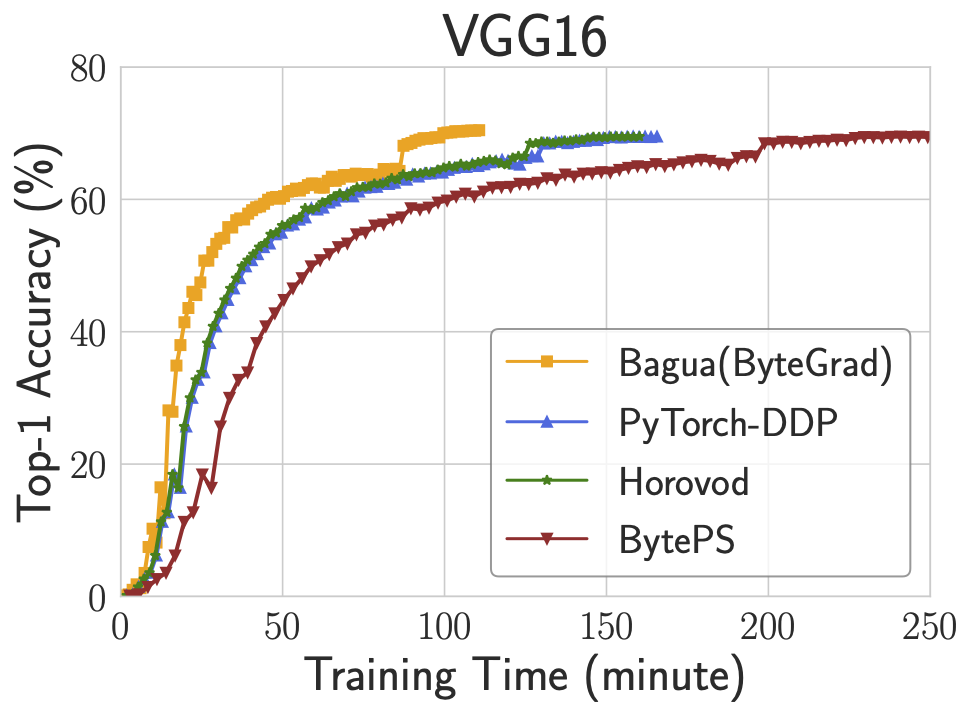
The figure above demonstrates the end-to-end training performance of three tasks. For each task, we select the best algorithm (according to the training efficiency and accuracy) from Bagua to compare with other systems. We use 128 GPUs (on 16 servers) to train VGG16 and BERT-Large, and 64 GPUs (on 8 servers) to train Transformer. Results show that Bagua can achieve 1.3 - 2 times of speedup compared with other systems.
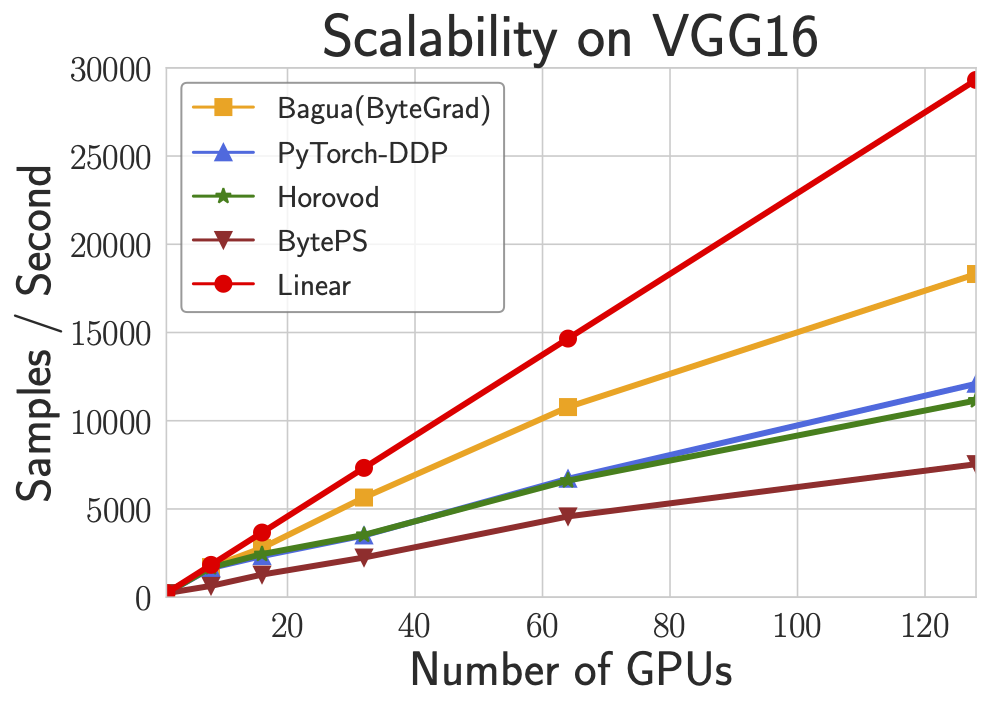
Scalability
VGG16 is known as a task that is difficult to scale because of its high ratio of communication and computation. This figure shows the scalability of four systems on VGG16 with up to 128 GPUs. We can see that Bagua achieves obviously higher scaling efficiency than other systems.

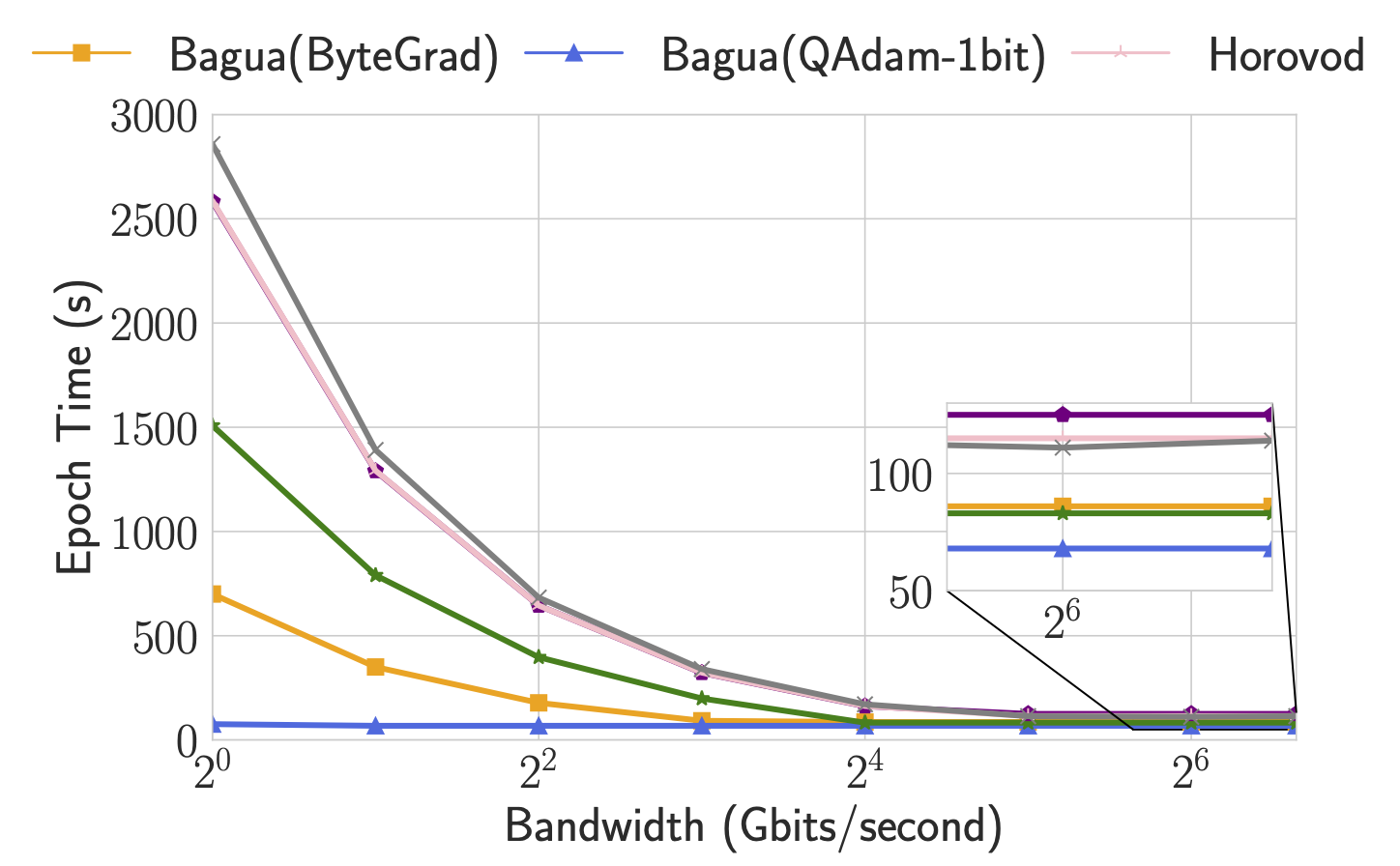
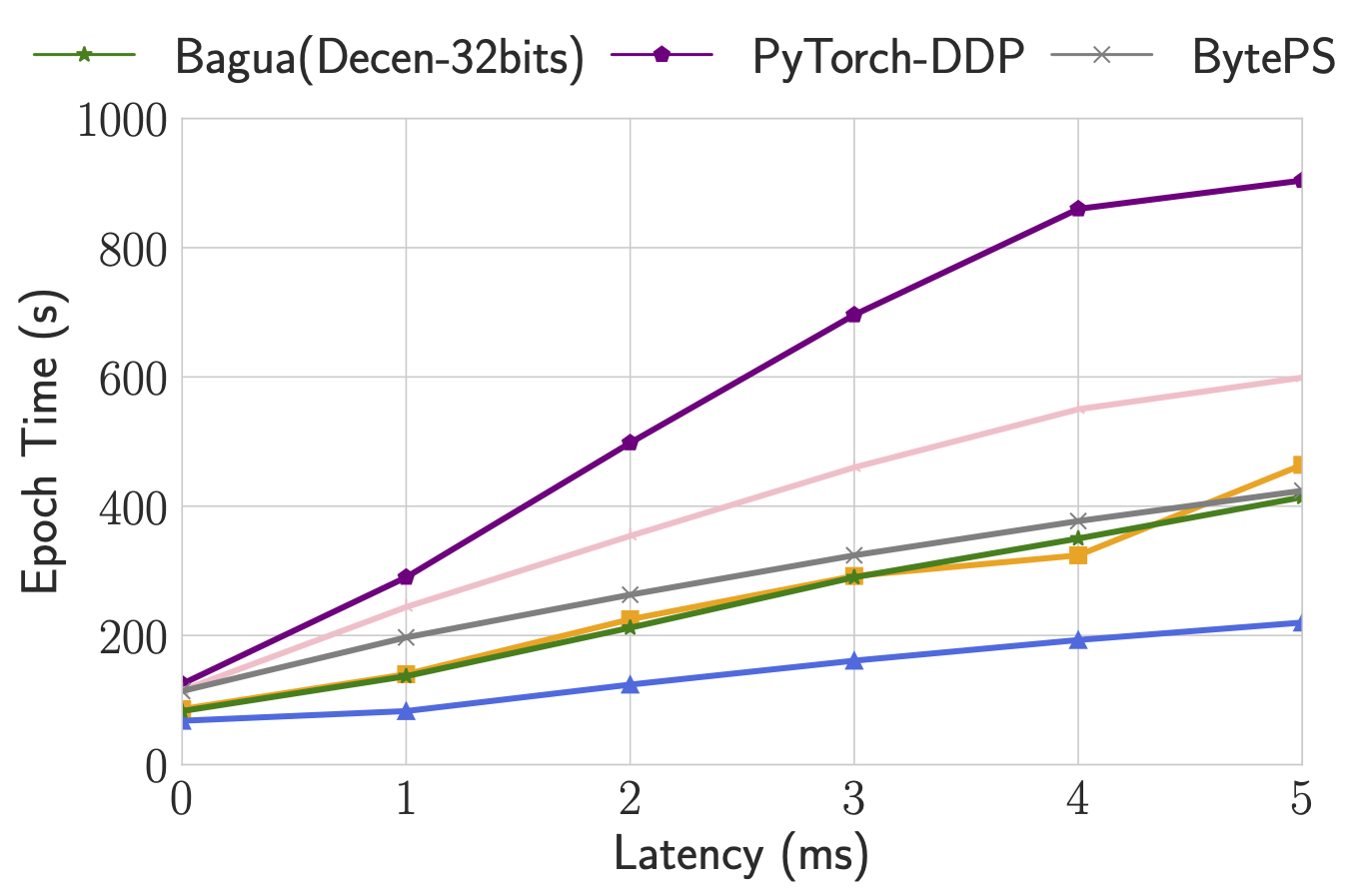
Trade-off of algorithms regarding network conditions
By supporting a diverse collection of algorithms, Bagua provides users the flexibility to choose algorithms for different tasks and network conditions (in terms of latency and bandwidth). To understand behaviors of these algorithms under different network conditions, we manually change the bandwidth and latency of connections between servers and report the epoch time accordingly.


This figure shows the epoch time of Bagua (with three algorithms) and other systems when the bandwidth has been changed from 100 Gbps to 1 Gbps, and the latency has been changed up to 5 ms. As we can see, when the interconnections are slower than the fast network that we previously adopted, Bagua can provide even more significant performance boost over the existing systems. Specifically, when the bandwidth is low, algorithms that require less amount of data transmission (e.g., QAdam, ByteGrad) outperform others. When the latency is getting high, algorithms that require fewer connections (e.g., decentralized SGD) tend to be degraded less than other methods. If we keep increasing the latency, we can observe that the decentralized SGD outperforms all others.
How to Create a New Algorithm
Thanks to the innovative design of Bagua, algorithm developers now can easily create, test and benchmark their distributed learning algorithms in a realistic system. Within Bagua, developers have the freedom to manipulate almost all the details regarding the data-parallel distributed training, including What to communicate, When to communicate, How to update the model and so on. Besides, algorithms incorporated in Bagua automatically benefit from our system optimizations, like memory management, execution management, communication/computation overlapping and so on, so that developers could take full advantage of the algorithm without a compromise caused by an inefficient implementation.
In this tutorial, we take Quantized Adam (Q-Adam) algorithm, inspired by this paper, as an example to describe how to create a new algorithm with Bagua. The complete code can be found here. We also welcome contributions to add more built-in algorithms!
Let's first summarize the updating rule of Q-Adam algorithm as follows: ( is the warm-up steps)
-
Warm up stage: ( )
-
Calculating gradients .
-
Communicate from all workers with full precision to get .
-
Update and :
-
Update model :
-
-
Compression stage: ( )
- Calculating gradients .
- Update with local gradients:
- Compress into .
- Communicate from all workers with low precision to get
- Update model :
To implement such an advanced distributed learning algorithm in any other popular ML system is far from trivial. Basically, the developer has to hack deeply into the source code and break their fine-grained communication optimizations. As the result, it is likely that one cannot observe any speedup compared with the basic Allreduce operation, actually in most cases it's even slower.
Bagua provides a class called Algorithm. All a developer needs to do is to override pre-defined functions of this class as she wishes. (see API document for more detailed information). In this example of Q-Adam, we need to override six functions as follows:
__init__(): Initializing the algorithm. Here Q-Adam algorithm requires an optimizer calledQAdamOptimizer, which is a specifically customized optimizer based on the Adam optimizer in order to meet the special updating rule of Q-Adam algorithm. Compared with the original Adam optimizer, the main difference ofQAdamOptimizeris that, in the compression stage, communicating and updating are conducted by the Bagua backend, instead of the optimizer. Like all other optimizers in PyTorch,QAdamOptimizerneeds to be initialized with model parameters. Besides, an extra argumentwarmup_stepsdecides how many steps of the warm-up stage.QAdamAlgorithmcan be initialized simply by theQAdamOptimizer.
from bagua.torch_api.algorithms import q_adam
optimizer = q_adam.QAdamOptimizer(
model.parameters(),
lr=1e-3,
warmup_steps=100
)
class QAdamAlgorithm(Algorithm):
def __init__(self, q_adam_optimizer):
self.optimizer = q_adam_optimizer
self.warmup_steps = self.optimizer.warmup_steps
need_reset(): As we can see, Q-Adam algorithm has two stages, which have very different logic regarding the communication contents and updating rules.need_reset()compares the current iteration with the warm-up steps, such that it can tell theBaguabackend to reset the algorithm. This function is checked by the Bagua engine for every iteration.
def need_reset(self):
return self.optimizer.step_id == self.warmup_steps
init_tensors(): This function defines what needs to be communicated by registering intended tensors into the Bagua backend. Note that a developer can register any tensors as she wants. Q-Adam needs to communicate gradients or momentums, therefore, we register them according to the current stage.
tensors = []
for param, name in parameters:
if self.optimizer.step_id < self.warmup_steps:
registered_tensor = param.bagua_ensure_grad().to_bagua_tensor(name, bagua_module.bagua_module_name)
else:
registered_tensor = param.momentum.to_bagua_tensor(name, bagua_module.bagua_module_name)
tensors.append(registered_tensor)
return tensors
-
tensors_to_buckets(): This function is related to the tensor fusion optimization. Bagua would fuse small tensors into buckets to conduct the communication. In this function, one can customize which tensors should be fused together. By default, Bagua will fuse tensors based on the order of gradient computation during the backward. -
init_operations(): This function can define communication and computation operations of the algorithm. Let's first talk about the warm-up stage. Since we just need to average gradients, we adoptappend_centralized_synchronous_opwithout compression, which is a centralized, full precision, synchronous communication operation. After the communication, updating , and will take place locally in theQAdamOptimizer.step()after the backward process. In the compression stage, it becomes more complicated. As shown in the algorithm, we need to update before the communication. To support this process, we useappend_python_opto add a python functioncalculate_momentumto momentum tensors. Then we can useappend_centralized_synchronous_opwithMinMaxUInt8compression to communicate momentums.
if self.optimizer.step_id < self.warmup_steps:
bucket.append_centralized_synchronous_op()
else:
def calculate_momentum(*args):
beta1, beta2 = self.optimizer.param_groups[0]['betas']
for tensor in bucket.tensors:
tensor.mul_(beta1).add_(tensor._one_bit_grad, alpha=1 - beta1)
bucket.append_python_op(calculate_momentum)
bucket.append_centralized_synchronous_op(
hierarchical=True,
scattergather=True,
compression="MinMaxUInt8",
)
init_backward_hook():Baguabackend will trigger this function for each tensor when its gradient calculation is finished. Then the algorithm is responsible to mark corresponding tensors as ready for executing the predefined operations in the previous step.
def init_backward_hook(self, bagua_module: BaguaModule):
def hook_momentum(parameter_name, parameter):
parameter.momentum.bagua_mark_communication_ready()
def hook_grad(parameter_name, parameter):
parameter.grad.bagua_mark_communication_ready()
return hook_grad if self.optimizer.step_id < self.warmup_steps else hook_momentum
Now we can use our newly defined algorithm in the training! To try out your algorithm, simply initialize our new algorithm in the training script and provide it to the with_bagua interface. Enjoy!
optimizer = QAdamOptimizer(
model.parameters(),
lr=1e-3,
warmup_steps=100
)
algorithm = QAdamAlgorithm(optimizer))
model.with_bagua([optimizer], algorithm=algorithm)
Elastic Training
Introduction
By applying TorchElastic, bagua can do elastic training. We usually use the capabilities of Elastic Training to support the following two types of jobs:
Fault tolerant jobs
Jobs that run on infrastructure where nodes get replaced frequently, either due to flaky hardware or by design. Or mission critical production grade jobs that need to be run with resilience to failures.
Dynamic capacity management
Jobs that run on preemptible resources that can be taken away at any time (e.g. AWS spot instances) or shared pools where the pool size can change dynamically based on demand.
Quickstart
You can find a complete example at Bagua examples.
1. Make your program recoverable
Elastic training means that new nodes will be added during the training process. Your training program need to save the training status in time, so that the new joining process can join the training from the most recent state.
For example:
model = ...
model.load_state_dict(torch.load(YOUR_CHECKPOINT_PATH))
for train_loop():
...
torch.save(model.state_dict(), YOUR_CHECKPOINT_PATH)
2. Launch job
You can launch elastic training job with bagua.distributed.run. For example:
Fault tolerant (fixed number of workers, no elasticity)
python -m bagua.distributed.run \
--nnodes=NUM_NODES \
--nproc_per_node=NUM_TRAINERS \
--rdzv_id=JOB_ID \
--rdzv_backend=c10d \
--rdzv_endpoint=HOST_NODE_ADDR \
YOUR_TRAINING_SCRIPT.py (--arg1 ... train script args...)
Part of the node failure will not cause the job to fail, the job will wait for the node to recover.
HOST_NODE_ADDR, in form <host>[:<port>] (e.g. node1.example.com:29400), specifies the node and
the port on which the C10d rendezvous backend should be instantiated and hosted. It can be any
node in your training cluster, but ideally you should pick a node that has a high bandwidth.
If no port number is specified
HOST_NODE_ADDRdefaults to <host>:29400.
Elastic training(min=1, max=4)
python -m bagua.distributed.run \
--nnodes=1:4 \
--nproc_per_node=NUM_TRAINERS \
--rdzv_id=JOB_ID \
--rdzv_backend=c10d \
--rdzv_endpoint=HOST_NODE_ADDR \
YOUR_TRAINING_SCRIPT.py (--arg1 ... train script args...)
For this example, the number of training nodes can be dynamically adjusted from 1 to 4.
Reference
Performance Autotuning
Bagua comes with several adjustable hyperparameters for communication that can affect runtime performance. For example tensor fusion bucket size.
Determining the best combination of these hyperparameters to maximize system performance can be a process of a lot of trial-and-error, as many factors including model complexity, network bandwidth, and GPU hardware can all affect the best parameter to choose.
Bagua provides a mechanism to automate this process of choosing the best values for these hyperparameters. The Bagua autotuning system uses Bayesian optimization to efficiently search through the space of hyperparameters. This feature can be enabled by providing the --autotune_level 1 flag to bagua.distributed.run:
python -m bagua.distributed.run --nproc_per_node ... --autotune_level 1 python train.py
The main process of autotune is simple. The autotune system finds groups of hyperparameters through Bayesian optimization, and the hyperparameters are brought into the training to verify the performance, each group of hyperparameters takes seconds to verify.
Generally speaking, the larger the is, the larger the search space, and the more likely it is to find the best hyperparameters. The larger the , the more accurate the measurement of the group of hyperparameters' performance.
In addition, the autotune system skips the first seconds to warmup.
You can adjust with the --autotune_max_samples flag and adjust with the --autotune_sampling_confidence_time flag, adjust with the --autotune_warmup_time.
Debugging
The autotuning system dumps the tuning process in a file. The file path is specified by the parameter --autotune_logfile, and the default value is /tmp/bagua_autotune.log.
The file format is csv, each row is the hyperparameters and scoring of a round of iteration:
bucket_size_2p,is_hierarchical_reduce,score,train_iter
23,False,1.4117491757441083,300
15,True,1.1258082798810858,400
29,True,1.0463204022477832,500
bucket_size_2p is the power of 2 of the bucket size, for example bucket_size_2p=23 means bucket_size is 8388608 bytes ().
Case study
For example, on a popular speech recognition task (aishell2), training with autotune increased the throughput by 8.26%.

This figure shows the gradual increase in training performance during tuning. In this experiment, the hyperparameters are changed approximately every 100 iterations. The x-axis is the number of iterations. The y-axis is the data throughput.
More Optimizations
Besides communication algorithms, Bagua supports many convenient tools to further accelerate your training workload. Currently we support:
- Generic fused optimizer, which fuses optimizer step operations for multiple layers, and it is generic because it can be applied to arbitrary PyTorch optimizer, in contrast to NVIDIA Apex's approach, where only some specific optimizers are implemented
- Load balanced data loader, which accelerates workloads such as NLP and speech where training samples are of different length. This dataloader distribute training samples in a way that each worker receives samples of similar length, so that they finish a batch in similar time, mitigating the straggler problem in distributed setups.
We welcome more contributions!
Kubernetes operator for Bagua jobs
Bagua supports kubernetes with a dedicated Bagua operator. This greatly simplifies deployments in modern computing cluster.
Prerequisites
- Kubernetes >= 1.16
Installation
Run the operator locally
git clone https://github.com/BaguaSys/operator.git
cd operator
# install crd
kubectl apply -f config/crd/bases/bagua.kuaishou.com_baguas.yaml
go run ./main.go
Deploy the operator
Install Bagua on an existing Kubernetes cluster.
kubectl apply -f https://raw.githubusercontent.com/BaguaSys/operator/master/deploy/deployment.yaml
Enjoy! Bagua will create resources in namespace bagua.
Examples
You can run demos in config/samples:
Static mode
"Static mode" means running the Bagua distributed training job with fixed number of nodes, and no fault tolerance.
kubectl apply -f config/samples/bagua_v1alpha1_bagua_static.yaml
Verify pods are running:
kubectl get pods
NAME READY STATUS RESTARTS AGE
bagua-sample-static-master-0 1/1 Running 0 45s
bagua-sample-static-worker-0 1/1 Running 0 45s
bagua-sample-static-worker-1 1/1 Running 0 45s
Elastic mode
"Elastic mode" means running the Bagua distributed training job in elastic mode, which means the number of nodes can be dynamically adjusted, and the job is fault tolerant.
kubectl apply -f config/samples/bagua_v1alpha1_bagua_elastic.yaml
Verify pods are running
kubectl get pods
NAME READY STATUS RESTARTS AGE
bagua-sample-elastic-etcd-0 1/1 Running 0 63s
bagua-sample-elastic-worker-0 1/1 Running 0 63s
bagua-sample-elastic-worker-1 1/1 Running 0 63s
bagua-sample-elastic-worker-2 1/1 Running 0 63s
Frequently Asked Questions and Troubleshooting
Dataloader sometimes hang when num_workers > 0
Add torch.multiprocessing.set_start_method("forkserver"). The default "fork" strategy is error prone by design. For more information, see PyTorch documentation, and StackOverflow.
Error when installing Rust
If you see some error like the message below, just clean the original installation record first by rm -rf /root/.rustup and reinstall.
error: could not rename component file from '/root/.rustup/toolchains/stable-x86_64-unknown-linux-gnu/share/doc/cargo' to '/root/.rustup/tmp/m74fkrv0gv6708f6_dir/bk'error: caused by: other os error.
Hang when running a distributed program
You can try to check whether the machine has multiple network interfaces, and
use command NCCL_SOCKET_IFNAME=network card name (such as eth01) to specify
the one you want to use (usually a physical one). Card information can be
obtained by ls /sys/class/net/.
Model accuracy drops
Using a different algorithm or using more GPUs has similar effect as using a different optimizer, so you need to retune your hyperparameters. Some tricks you can try:
- Train more epochs and increase the number of training iterations to 0.2-0.3 times more than the original.
- Scale the learning rate. If the total batch size of distributed training is increased by times, the learning rate should also be increased by times to be .
- Performing a gradual learning rate warmup for several epochs often helps (see also Accurate, Large Minibatch SGD: Training ImageNet in 1 Hour).